Không ai cần phải phát minh lại bánh xe, nhưng thiết kế lại dụng cụ nội soi đại tràng (ruột già) chắc chắn là việc đáng giá thời gian. Ít nhất là đối với Mark Rentschler, phó giáo sư tại Đại học Colorado Boulder. Ông và nhóm nghiên cứu của ông đang nghiên cứu chế tạo một con sâu robot có thể thay thế cho chiếc camera nội soi ruột già thông thường.
“VỀ CƠ BẢN, BẠN ĐANG ĐẨY MỘT SỢI DÂY ĐI QUA RUỘT GIÀ GẤP KHÚC CỦA MÌNH”
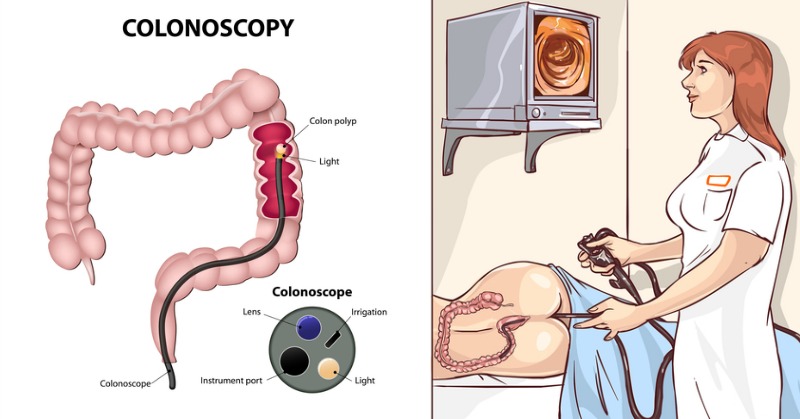
"Đừng hiểu sai ý tôi”, Rentschler nói khi ông nhận được câu hỏi về lý do tại sao ông theo đuổi vấn đề này. Ông cho rằng các phương pháp nội soi truyền thống hoạt động rất tốt, nhưng chúng không hề dễ chịu cho bệnh nhân. Phương pháp nội soi cũ, về cơ bản, có nghĩa là đẩy một sợi dây gắn camera đi qua một đường ống gấp khúc (ruột già). Và đoạn dây này chỉ uốn cong khi bạn tác động một lực đủ mạnh lên thành ruột già. Đó là khi bệnh nhân cảm thấy rất khó chịu.
Loại bỏ sự khó chịu này không chỉ vì mục đích mang lại sự thoải mái cho người bệnh. Rentschler cho biết nếu ung thư ruột già được phát hiện sớm, bạn gần như được đảm bảo rằng bạn sẽ sống. Vấn đề là mọi người thường rất sợi hãi nội soi, vì thế mà họ không đi kiểm tra ruột.
Để khắc phục vấn đề này, các nhà khoa học đang nghiên cứu một số mẫu thiết kế nội soi khác nhau, chúng đều có mức độ tự động nhất định. Một số có dải bánh xích như xe tăng, một số có bánh xe, tuy nhiên Rentschler và các cộng sự của ông nghĩ rằng cách tốt nhất là mô phỏng các chuyển động tự nhiên bên trong cơ thể.
Đó là lý do tại sao họ chọn nhu động (sự co bóp lượn sóng đi dọc theo các cơ quan hình ống như ruột) làm hình thức chuyển động cho dự án này. Sự co thắt và giãn của cơ được cơ thể sử dụng để di chuyển thức ăn dọc theo ruột. Vậy tại sao chúng ta lại không sử dụng nó để di chuyển robot?
Sự nhu động mà con robot của Rentschler mô phỏng được là dựa vào việc sử dụng lò xo làm từ hợp kim nhớ hình dạng - một vật liệu có thể "nhớ" được hình dạng của nó và quay trở lại hình dạng này khi bị nung nóng. Phần kim loại này được làm nóng bằng một dòng điện nhỏ chính giữa có khả năng lan truyền ra ngoài. Sau đó, sự kết hợp của khí làm mát và vỏ silicon in 3D bao phủ bề mặt của robot hoạt động như một lực phục hồi tự nhiên để đẩy dòng điện ngược vào trong. Rentschler cho rằng với cách này chúng ta có thể điều khiển và “lái” con robot theo ý muốn, còn lại chỉ cần đặt một chiếc camera tí hon vào đầu nó.
Con robot đã được ra mắt hồi đầu tháng này tại Hội nghị Quốc tế về Robot và Tự động hóa 2017 của IEEE (gọi tắt là ICRA). Tuy nhiên, nó vẫn đang ở giai đoạn thử nghiệm, và cần được cải tiến nếu nó thực sự đi vào sử dụng.
Rentschler muốn giảm đường kính của con robot thêm một chút nữa, và một thách thức lớn khác là tốc độ của nó. Ngay bây giờ, con robot có thể trườn với tốc độ khoảng 6 inch (~ 15,2 cm) trong 15 giây. Một cuộc xét nghiệm nội soi đại tràng trung bình mất khoảng 30 phút, và mục đích của Rentschler là giảm khoảng thời gian này xuống còn 20 phút.
Và với phương pháp nội soi tốt hơn, nhiều sinh mạng sẽ được cứu sống. Không tệ chút nào đối với một con robot rúc rích, ngọ nguậy.
Theo: The Verge

༼ つ ◕_◕ ༽つ I'm so o.p. Plz neft ༼ つ ◕_◕ ༽つ
༼ つ ◕_◕ ༽つ I'm so o.p. Plz neft ༼ つ ◕_◕ ༽つ
༼ つ ◕_◕ ༽つ I'm so o.p. Plz neft ༼ つ ◕_◕ ༽つ
༼ つ ◕_◕ ༽つ I'm so o.p. Plz neft ༼ つ ◕_◕ ༽つ